Robotics
Pliant Energy Systems
Robotics

Overview
Efficient undulating propulsion system
Excellent static thrust/Watt
Stealth characteristics
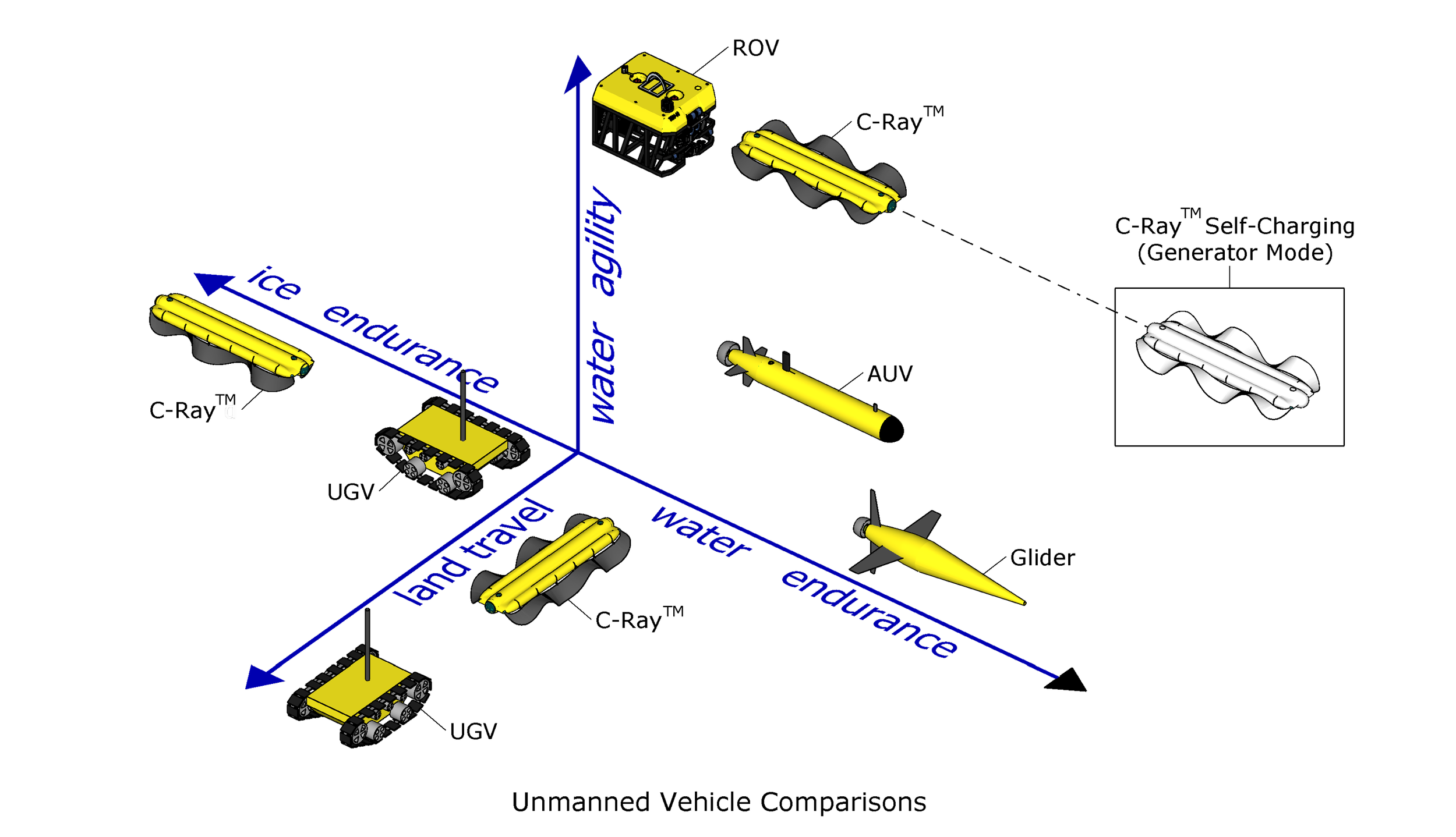
Amphibious capabilities over sand, snow, ice and other solid substrates
Resistant to entanglement in plants or other aquatic debris
Lower environmental impact than spinning propeller-thrusters
Pliant’s robots use several modes of locomotion found in the animal kingdom with just one pair of “fins”. These fins are best described as four-dimensional objects with a hyperbolic geometry that allows the robot to swim like a ray, crawl like a millipede, jet like a squid, and slide like a snake.
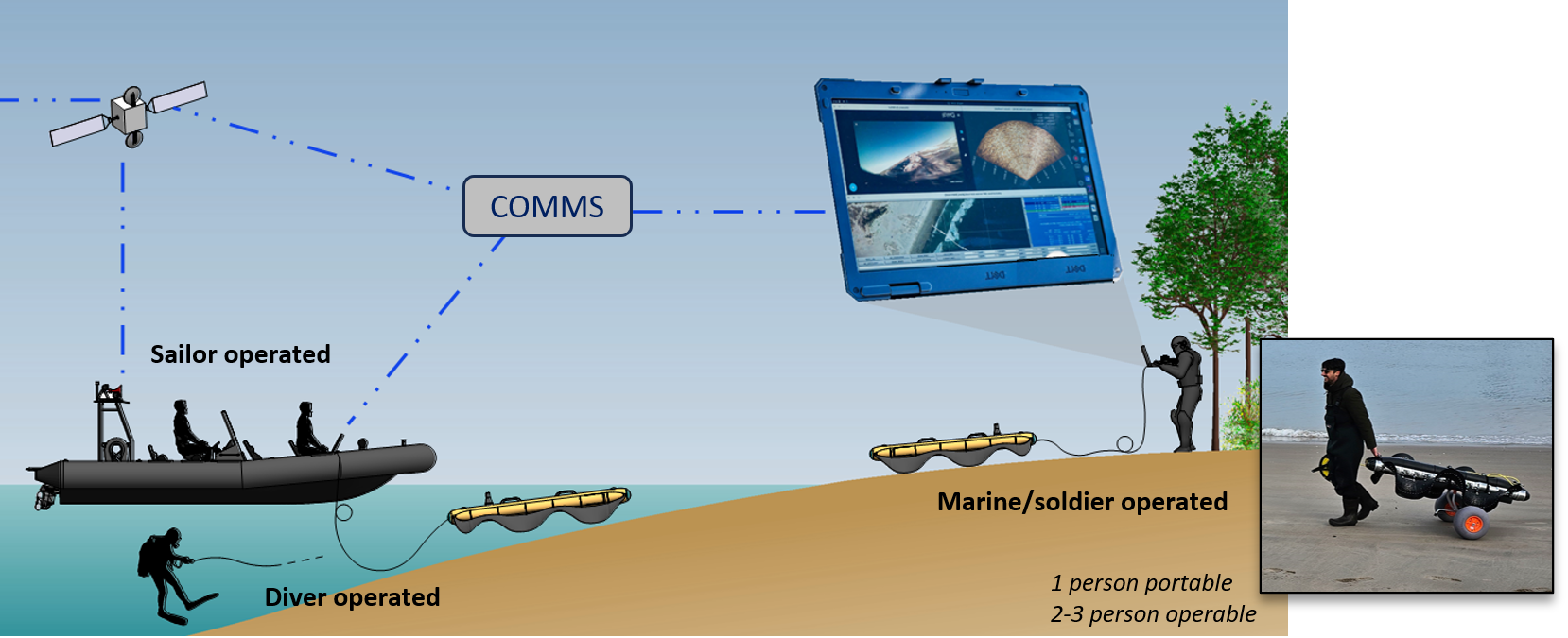
A craft equipped with this system has unprecedented freedom to travel through a range of environments in a single mission. As an underwater vehicle, the robot’s ability to instantly reverse direction and do quick turns make it ideal for tasks such as coral reef inspection or lion fish hunting where a craft must rapidly maneuver to look around and between objects.
C-Ray AUV/ROV Platform: Unprecedented Versatility
A single vehicle that can move through multiple environments in a single mission.


Above: Ultra maneuverable and stealthy four-finned vehicle scans submarine.

Above: Ultra maneuverable four-finned vehicle quietly inspects sea mine.

Above: Velox delivering ammo and medical supplies during an amphibious beach mission

Above: Agile autonomous pipeline scanning vehicle with onboard AI detecting and scrutinizing anomalies for richer mission data set. Avoids sending ship and ROV to scrutinize false positives. Optimizes preparation for intervention when needed.

Above: Velox observing polar bear mother with cubs. Wireless communications while above or near the surface of the water allow real-time control and recording from a safe distance.

Above: Velox traveling through plant-filled waters with low risk of entanglement, minimal damage to plants and minimal disturbance of sediment layers.
